


هماکنون بیش از ۱۶۵ سال از ابداع اولین آسانسور ایمن با محوریت تعلیق با نیروی اصطکاک و با استفاده از طناب فولادی (سیم بکسل) میگذرد.حال می خواهیم در رابطه با آسانسور های مغناطیسی مطالعه بیشتری داشته باشیم. امروزه تمامی آسانسورهای نصب شده در ساختمانهای بلند مرتبه از همین تکنولوژی جهت طراحی و نصب آسانسور استفاده می کنند: اصطکاک و نیروی کشش کاملاً مکانیکی.
تعداد ساختمانهای بلندمرتبه از سال ۲۰۰۰ به بعد سه برابر شده و هماکنون بیش از صدها ساختمان بالای ۲۵۰ متر در حال احداثاند.آسانسور مغناطیسی برای اولین بار توسط شرکت آلمانی تیسن کروپ طراحی و ساخته شد و به صورت آزمایشگاهی در مرکز شرکت نصب و اجرا گردید و بعد ها از این آسانسور مغناطیسی یا مگلو در کشورهای حاشیه خلیج فارس به اجرا در آمد.
از طرف دیگر، امروزه میلیونها آسانسور در جهان وجود دارد و روزانه تعداد قابل توجهی نفر توسط آسانسورها جابهجا میشوند. اهمیت در دسترس بودن و کارآیی آسانسورها از آنجا مطرح است که یک پژوهش نشان میدهد فقط در سال ۲۰۱۰ کارمندان تمامی ادارات شهر نیویورک در مجموع ۱۶.۶ سال را صرف انتظار برای آسانسور کردهاند .تکنولوژی آسانسور با نیروی پیشران مغناطیسی با جایگزین کردن موتورهای خطی (Linear Synchronous Motor) به جای سیم بکسل و موتورهای متداول کنونی نسل جدید تکنولوژی آسانسورهایی هستند که میتوانند انقلاب عظیمی در صنعت طراحی و ساخت آسانسورها و همچنین طراحی ساختمانها و بلندمرتبهسازی به وجود آورند.

شناوری مغناطیسی و یا MAGLEV تکنولوژی جدید در صنعت حمل ونقل محسوب میشود. مگلو با داشتن سرعتی بالا از سیستمهای تعلیق مغناطیسی غیرتماسی، هدایتکننده و رانشی استفاده میشود. سیستم مگلو با بهره گیری از میدان مغناطیسی که بین وسیله نقلیه و ریل راهنما ایجاد میگردد در فاصله اندکی از خط معلق مانده و در طول آن به حرکت در میآید. در شناوری مغناطیسی به دلیل عدم تماس فیزیکی، اصطکاک تماسی وجود ندارد. سه ویژگی اصلی تکنولوژی مگلو عبارتاند از:
الف) سیستم شناوری
ب) سیستم رانشی
ج) سیستم هدایتگر
در طراحی سیستم های فوق از نیروهای مغناطیسی به منظور اجرای سه هدف ذکر شده استفاده میشود.
بررسی انواع سیستمهای این تکنولوژی از آنجا حائز اهمیت است که سابق براین استفاده از آنها در قطارها استفاده شده و هماکنون میبایست با تغییراتی بسته به نوع عملکرد مورد نیاز از آنها برای یک وسیله نقلیه با حرکت عمودی (کابین آسانسور) استفاده شود. در حال حاضر در بین سیستمهای موجود در جهان دو طراحی عمده و اصلی و در عین حال متفاوت در طراحی سیستمهای شناوری وجود دارد. این نوع سیستمها عبارتاند از:
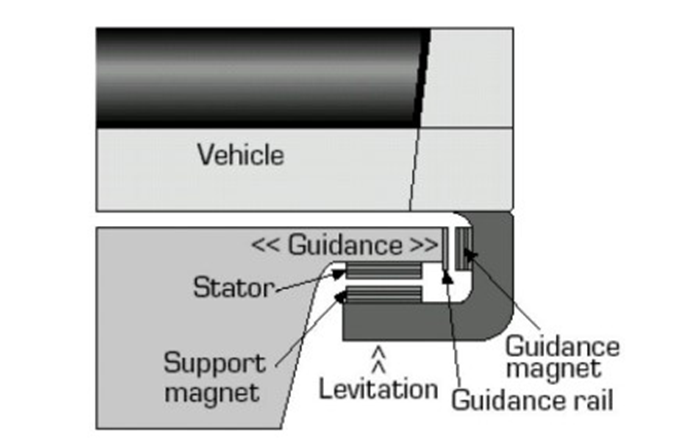
– سیستم قطار مگلو ساخت کشور آلمان با نام ترنسرپید (Transrapid ) با سابقه احداث و بهره برداری در شانگهای چین است. طراحی آن از نوع شناوری مغناطیسی EMS نامیده می شود. عملکرد این سیستم براساس نیروی جاذبه است. سیستم قطار مگلو احداث شده توسط ژاپن که شناوری الکترودینامیک EDS نامیده میشود.
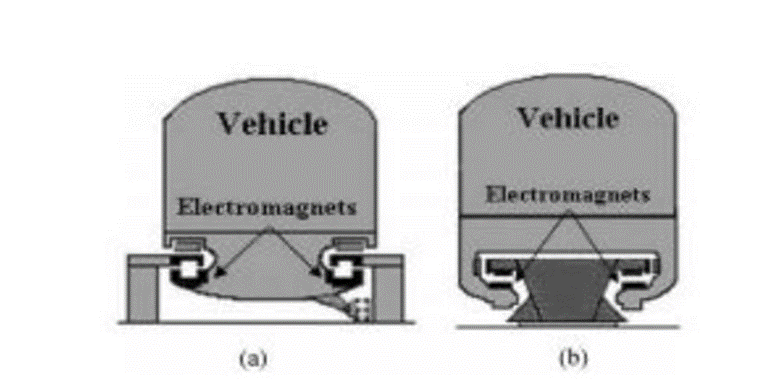
طراحی مگلو سری MLU مرکزتحقیقات فنی ژاپن و مرکز راهآهن سابق ژاپن سیستم EDS میباشد. عملکرد این سیستم براساس نیروی دافعه است. در سیستمهای شناوری الکترومغناطیسی آهنرباهای پشتیبان تکیهگاهی مهار شده الکترونیکی که به صورت الکتریکی کنترل میشوند. در هر دو طرف در سرتاسر راستای طولی وسیله نقلیه قرار دارد و باعث بلند شدن و شناور وسیله نقلیه برروی مولدهای فرومغناطیسی نصب شده در سطح زیرین هادی راه میگردد.
آهن رباهای الکتریکی در وسیله نقلیه در اندرکنش با ریلهای فرومغناطیسی هادی راه بوده و آنها را به خود جذب میکند.
آهن رباهای الکتریکی متصل به سطح زیرین وسیله نقلیه که در تماس مستقیم با هادی راه میباشد، وسیله نقلیه را در زمانیکه در حال حرکت نیست در حدود یک متر با فاصله از هادی را به حالت شناوری در میآورد و به صورت معلق نگاه میدارد. نیروهای جاذبه طبیعتاً سبب ناپایداری وسیله نقلیه میشود زیرا با افزایش نیروی جاذبه فاصله وسیله نقلیه و هادی راه کاهش مییابد. سیستم کنترل الکترونیکی به گونه ای تجهیز شده است تا فاصله بین هادی راه و وسیله نقلیه را حفظ کرده و از تماس آن دو جلوگیری به عمل آورد. سیستم شناوری از باتریهایی استفاده مینماید که مستقل از سیستم رانشی میباشد.
وسیله نقلیه(آسانسور های مغناطیسی) این قابلیت را دارد که تا یک ساعت بدون احتیاج به انرژی خارجی شناور باقیمانده و حرکت نماید. به منظور شناورشدن وسیله نقلیه در سیستم ترنس رپید احتیاج به نیرویی حتی کمتر از سیستم سرمایش و گرمایش وسیله نقلیه میباشد. انرژی الزم جهت تأمین حالت شناوری بسیار ناچیز بوده ولی جهت حرکت وسیله نقلیه به انرژی زیادی نیاز است.
در سیستم شناوری الکترودینامیکی، آهنربای مغناطیسی در وسیله نقلیه استفاده میشود. در سرتاسر خط آهنرباهایی در بخش داخلی خط وجود دارد که جریان برق را در جداره داخلی خط هنگامیکه وسیله نقلیه در حال حرکت است القا میکند. سیستم شناوری الکترودینامیکی براساس نیرویدافعه قطبهای همنام عمل مینماید. در آهنرباهای مغناطیسی واقع در زیر وسیله نقلیه و بر روی مسیر خط قطبهای غیرهمنام یکدیگر را دفع و وسیله نقلیه را بلند مینماید. تحت اثر نیروهای دافعه پایداری تکیهگاهی وسیله نقلیه در خط به طور ذاتی فراهم میگردد چرا که با افزایش دافعه مغناطیسی وسیله نقلیه خط، فاصلههای عمودی و جانبی افزایش مییابد. حرکت سیم پیچ مغناطیسی در طول خط از چسبیدن آهنرباهای نصب شده به زیر قطار جلوگیری می کند. و سبب میشود که قطار در حدود ۱ الی ۱۱ سانتیمتر از خط بلند شود.
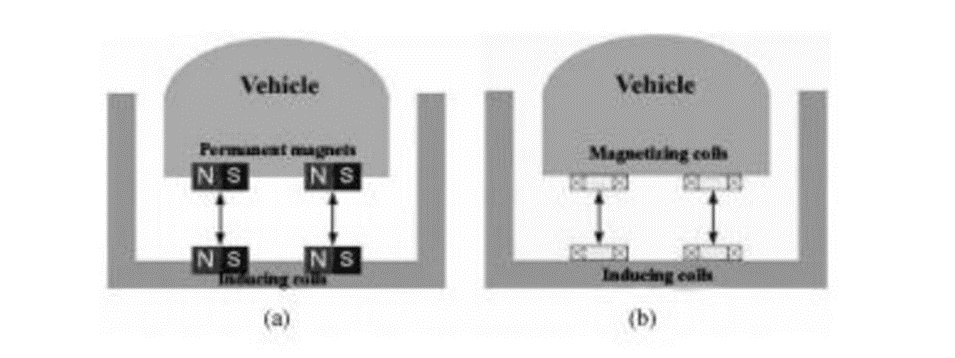
در سیستم فوق وسیله نقلیه در سرعتهای پایینتر از ۱۰۰ کیلومتر بر ساعت در حالتهای معلق یا شناوری قرار نمیگیرد. زیرا در سرعت های پایین نیروی به وجود آمده برای بلندکردن وسیله نقلیه کافی نخواهد بود. لذا واگنها به صورت هیبرید ساخته میشود. برای سرعتهای کمتر از چرخهایی برای حرکت استفاده میشود. بنابراین هزینههای تعمیر و نگهداری این سیستم نسبت به سیستم شناوری الکترومغناطیسی بیشتر است. هزینههای سیستم شناوری نیز نسبت به شناوری الکترومغناطیسی بیشتر است.
شناوری مغناطيسی برای جابهجایی عمودی کابين آسانسور مشابه شناوری مغناطیسی یک قطار جهت جابهجایی عمودی است. استفاده از یک موتورخطی در سیستم تکامل یافته یک قطار مگلو امکان ایجاد حرکت افقی و عمودی در یک ساختمان را میدهد. آنچه از خصوصیات سیستمهای حرکتی در تکنولوژی بالا گفته شد و آنچه به عنوان یک عملگر در ادامه بررسی میکنیم استفاده از تکنولوژی EMS برای یک آسانسور است. در حال حاضر شرکت تیسنکروپ در آلمان مراحل نهایی تست یک آسانسور مغناطیسی را انجام میدهد. این شرکت همان قطار ترنسرپید را با یک موتور کنترل خطی تعمیم داده است. جهت کاهش نیروی رانش کابین آسانسور، وزن کابین و دربهای آسانسور را با استفاده از مواد سبک کامپوزیت کربن به نصف جرم یک آسانسور سنتی مشابه تبدیل کرده است.
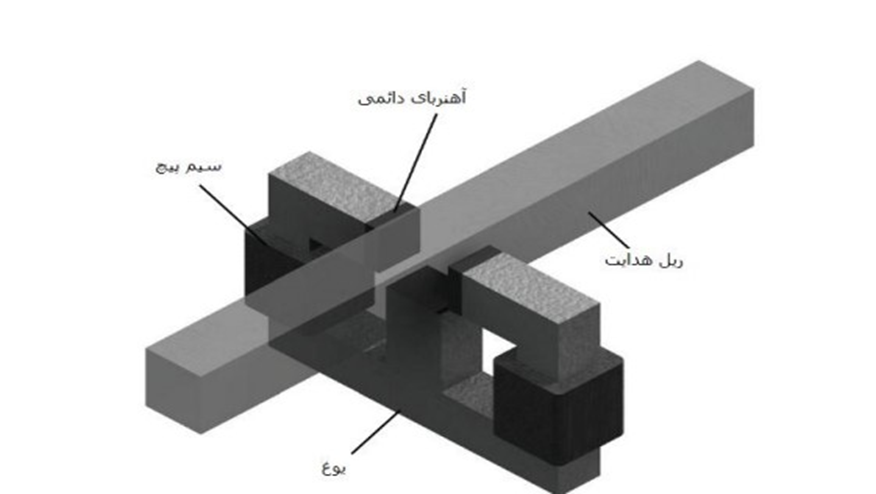
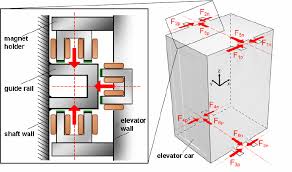
یک مؤلفهی مهم شیار هدایت کننده (guideway )عبارتاست از کفشک هدایت، که نیروهای اختلال را از ماشین بالابر به ریل هدایت ارسال میکند. همانطورکه ذکرشد، کفشهای هدایت متداول بااستفاده از غلتکها یا شیارهای لغزشی ساخته میشوند. گزینه الکترومغناطیسی ارائه شده، عملگر سه-بازو (TAA )است. TAA (Three Armed Actuator)یک عملگر الکترومغناطیس است که قادرمیباشد تا سه نیروی کششی مستقل را تحریک کند. این یک بهبود قابل توجه نسبت به عملگرهای U شکل متداول میباشد که یک نیروی کششی فقط در یک جهت تولید میکند. لذا یک TAA جایگزین سه عملگر U میشود. یک عملگر دیگر عبارتست از ماژول آهنربا که قبلاً ارائه شده است. که یک درجه آزادی کامل را کنترل میکند، بهعبارت دیگر یک نیرو در یک جهت (مثبت یا منفی) تولید میکند. با اینحال، TAA یک و نیم درجه آزادی را کنترل میکند. درنتیجه دو TAA جایگزین سه ماژول آهنربا میشوند.
شکل زیر طرح کلی یک TAA را نشان میدهد. آن از یک یوک (yoke )آهنی سه بازویی تشکیل میشود که با آهنرباهای دائمی روی سطوح قطب خارجی سوارشده است و سیم پیچها در اطراف بازوهای عرضی میباشند.
عملگرها روی لبه های مخالف سقف و کف ماشین بالابر سوارمیشوند. به عبارت دیگر، چهار TAA روی یک ماشین سوار میشوند. در ترکیب با دو ریل هدایت واقع شده روی دیوارههای مخالف شفت بالابر، سیستم هدایت کامل شکل میگیرد . درمجموع، چهار TAA ،دوازده نیروی کششی تولید میکنند که در جفتهایی درطول شش خط اعمال سازماندهی میشوند. لذا یک مجموع شش نیرو باقی میمانند تا موقعیت ماشین بالابر را کنترل کنند. درسمت چپ، دوازده نیروی منفرد ارائه میشوند. در سمت راست، نیروهای عمل کننده روی یک خط به شش نیروی کنترل FY2, FY1, FX4, FX3, FX2, FX1 ترکیب میشوند. بهخاطر این واقعیت که سه نیروی هر TAA بوسیله سیم پیچها تحریک میشوند، هشت متغیر جریان مستقل خطی برای تنظیم آنها موجود است. لذا هدایت یک ماشین بالابر بوسیله TAA ها مستلزم یک کنترل فیدبک یک سیستم فرا-تعیینی است.

انتقال تکنولوژی آسانسور از سیستم کششی اصطکاکی (تعلیق سیم بکسل) به شناوری مغناطیسی (تعلیق بدون سیم بکسل) بی تردید انقلاب عظیمی در تکنولوژی آسانسورها از پیدایش آن تاکنون ایجاد خواهد کرد. این تکنولوژی امکان حرکت افقی و عمودی کابین یک آسانسور و یا امکان حرکت چندین کابین آسانسور در یک چاه طراحیهای ساختمان را متحول خواهد کرد. این امکان، بسیاری از فضاهای ساختمانی که باید صرف چندین چاه آسانسور برای تعدادی مشخص آسانسور شود را حفظ میکند. از طرف دیگر این تکنولوژی کمک شایانی به بهبود مدت زمان انتظار مسافر برای رسیدن کابین آسانسور در یک ساختمان میکند. هرچند طراحی پیچیده و هزینه های بسیار بالا تجهیزات و نصب این آسانسورها تا زمان رسیدن به فراوانی بالا قابل اعتناست لیکن محدودیتهای نصب آسانسورهای کششی اصطکاکی در آسمانخراش ها از طرفی و رشد قابل توجه زندگی شهری از طرف دیگر، لزوم جایگزینی این تکنولوژی را یادآور میشود.
– شفا بخش، غلامعلی و عبدالباسط رستمی، بررسی چگونگی حرکت قطار های مغناطیسی”، چهاردهمین کنفرانس دانشجویان مهندسی عمران سراسر کشور، سمنان، دانشگاه سمنان، ۱۳۸۷.
– یعقوبی سرای، حمید، بررسی انواع مختلف خطوط و سیستم های مگ لو”، شورای مرکزی سـازمان نظـام مهندسـی ساختمان، نشریه فنی مهندسی شمس، سال ششم، شماره چهل و پنج و شش، مرداد و شهریور ۱۳۸۷ ،ص. ۳۲ تا ۳۷.
– فرشاد، سیامک و حمید یعقوبی سرای، مقایسه سیستمهای شناوری الکترومغناطیس و الکترودینامیـک در قطارهـای مغناطیسی”، شرکت قطارهای مسافری رجاء، نشریه فنی و تخصصی پیام رجا، سال دهم، شماره ۲۶ ،تیـر ۱۳۸۸ ،ص. ۳ تـا۹.
– یعقوبی سرای، حمید و سیدمحمدسادات حسینی، نقش فناوری نوین شناوری مغناطیسی در پیشبرد علم مهندسی حمل و نقل”، اولین همایش ملی فناوری های نوین در علوم مهندسی، مشهد، موسسه آموزش عالی خاوران، ۱۳۸۹
– فولادی، جواد و قدیمی، فرید، تکنولوژی آسانسورهای با نیروی شناوری مغناطیسی،اولین همایش ملی فناوری در مهندسی کاربردی باشگاه پژوهشگران جوان و نخبگان دانشگاه آزاد اسلامی، بهمن ماه ۱۳۹۵.
برای دیدن تصاویر بیشتر در این خصوص میتوانید پیج ما در اینستاگرام یا آپارات دنبال کنید.

آپارتماننشینی مشکلات خاص خودش را دارد. ممکن است روزی خیلی خسته از سرکار برگردید و ببینید که آسانسور خانه تان خراب است، یا بخاطر اینکه آسانور شما قدیمی ست از آمدن مهمان های مسن مثل پدربزر و مادربزرگ خودتون ناراحت هستید اگر در آپارتمان نبودید شاید چنین مشکلی اصلا به وجود نمیآمد؛ یا به محض اینکه متوجه عیب شدید آن را برطرف میکردید. اما در آپارتمان همه چیز به شما بستگی ندارد وخرابی آسانسور ساختمان می تواند باعث بروز چنین مشکلاتی شود.

مقدمه: مایع هیدرولیک عنصر مشترک در هر جزء هیدرولیک است و باید با دقت زیادی انتخاب شود. کیفیت و پاکیزگی سیال هیدرولیک عوامل تعیین کننده ای برای قابلیت اطمینان عملکرد، کارایی و عمر مفید یک سیستم است. هنگام استفاده از مایع هیدرولیک توصیه های سازنده روان کننده و مشخصات ارائه شده در برگه اطلاعات ایمنی […]

شرکت هومرا تولیدکننده انواع آسانسور و بالابر هیدرولیک به مدیریت جناب مهندس علی بی آرام می باشد که فعالیت خود را در این زمینه از سال 1388 شروع کرده است و از سال 1394 بصورت تخصصی آسانسورهای خانگی با برق تکفاز را برای اولین بار بصورت مبتکرانه به بازار معرفی کرده است. هدف ما ارئه خدمات ممتاز و نوین به همکاران و مصرف کننده های نهایی است که وفاداری خودشان را بارها و بارها نسبت به مجموعه ما ابراز داشته اند و ما نیز همیشه مدیون لطف و محبتشان هستیم و به پاس این اعتماد ارزشمند همکاران عزیز تلاش خواهیم کرد که جدیدترین تکنولوژیها را در این زمینه ارائه کنیم


